Our Contribution
Researchers in APL’s Intelligent Systems Center (ISC) work to create robots that can reason intelligently about the world in order to operate autonomously and safely, at high speeds, in the wild.

Developing novel controls for robotic systems operating safely in complex environments
Researchers in APL’s Intelligent Systems Center (ISC) work to create robots that can reason intelligently about the world in order to operate autonomously and safely, at high speeds, in the wild.
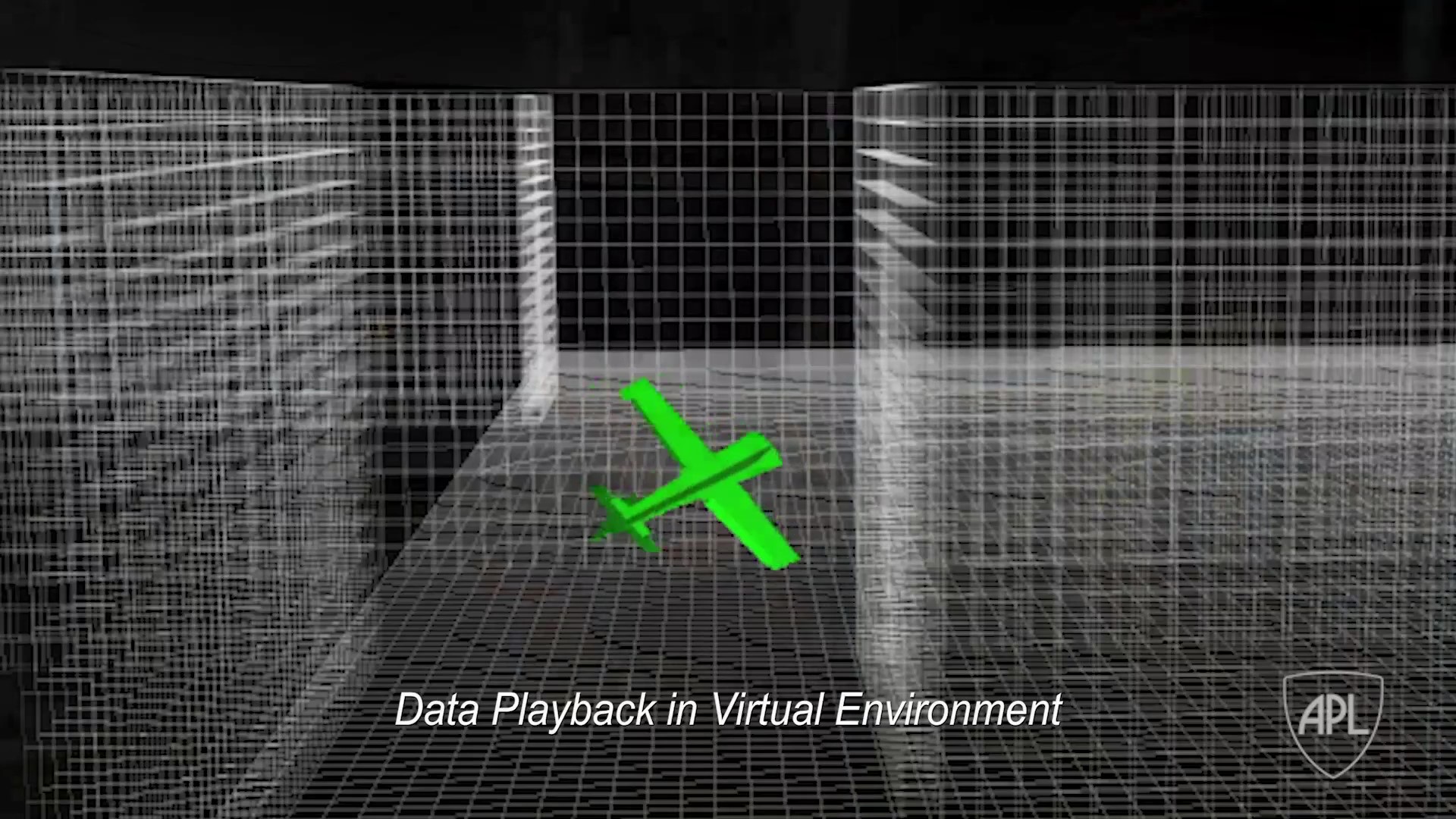
To test the NMPC algorithm, ISC researchers explored the receding-horizon case of navigating through a narrow corridor. They evaluated the algorithm in both simulation and hardware on a 24-inch-wingspan UAV, demonstrating agile fixed-wing flight using offboard sensing and computation.
This approach was also tested using onboard sensing and computation on a 42-inch-wingspan UAV operating in an urban environment.
Direct NMPC for Post-Stall Motion Planning with Fixed-Wing UAVs
Max Basescu and Joseph Moore
2020 IEEE International Conference on Robotics and Automation (ICRA)
Agile Fixed-Wing UAVs for Urban Swarm Operations
Max Basescu, Adam Polevoy, Bryanna Yeh, Luca Scheuer, Erin Sutton, and Joseph L. Moore
Field Robotics, vol. 3, pp. 725–765, 2023, doi:10.55417/fr.2023023
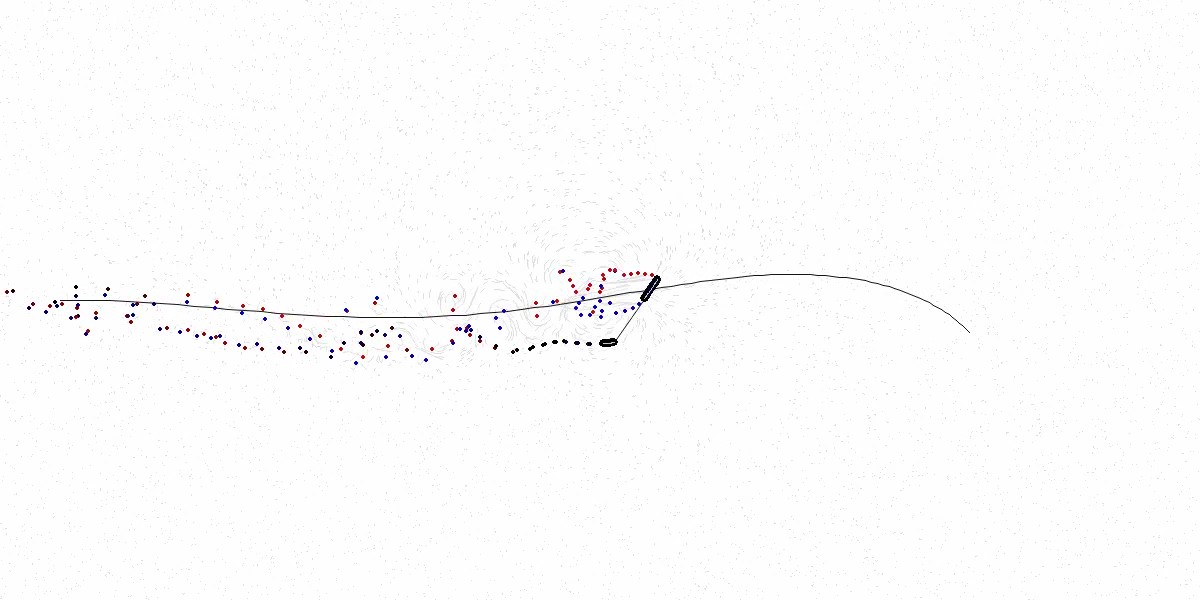
APL researchers demonstrated the improved performance in post-stall maneuver planning enabled by unsteady aerodynamics within a UAV’s flight dynamics model. A vortex particle model of local aerodynamics is integrated into model-based control for a morphing-wing UAV. This UAV’s performance is compared for gliding perch maneuvers with and without wing morphing and unsteady aerodynamics. Wing morphing planned using quasi-steady aerodynamics dramatically reduced performance, but wing morphing planned with unsteady aerodynamics improved performance. However, this result required pre-planning time; unsteady solutions generated in flight did not converge quickly enough for improved control.
Path Planning for a Morphing-Wing UAV Using a Vortex Particle Model
Gino Perrotta, Luca Scheuer, Yocheved Kopel, et al.
2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023)
The second domain ISC researchers explored was precision post-stall landing. Fixed-wing UAVs typically require long, flat runways. The objective of this effort was to land precisely with minimum speed and in minimum distance. Researchers used as little thrust as possible to land from a significant cruise speed and altitude (above the tree line). They explored both a trajectory library approach as well the aforementioned NMPC approach. Both algorithms leveraged radial basis function neural networks to more precisely model the lift, drag, and moment coefficients associated with the post-stall regime. The algorithm was tested on a 60-inch-wingspan, 4.5-kg fixed-wing UAV and demonstrated precision landing in variable wind.
Precision Post-Stall Landing Using NMPC with Learned Aerodynamics
Max Basescu, Bryanna Yeh, Luca Scheuer, Kevin Wolfe, and Joseph Moore
IEEE Robotics and Automation Letters, vol. 8, no. 5, pp. 3031–3038, 2023, doi:10.1109/LRA.2023.3264738
Precision Post-Stall Landing Using NMPC with Learned Aerodynamics
Max Basescu, Bryanna Yeh, Luca Scheuer, Kevin Wolfe, and Joseph Moore
2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023)
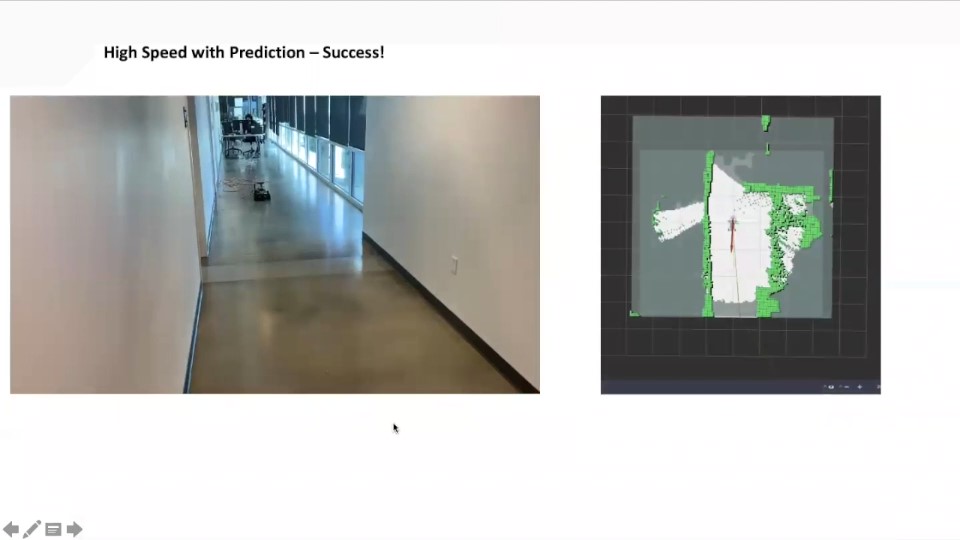
Safe high-speed navigation is a key enabling capability for real-world deployment of robotic systems. A significant limitation of existing approaches is the computational bottleneck associated with explicit mapping and the limited FOV of existing sensor technologies. Researchers in the ISC study algorithmic approaches that allow robots to predict spaces extending beyond the sensor horizon, opening the possibility of robust planning at high speeds and more efficient map exploration.
They accomplish this by using a generative neural network trained from real-world data. They extend their existing control algorithms to support leveraging the predicted spaces to improve collision-free planning and navigation at high speeds. Using a physical robot based on the MIT RACECAR equipped with an RGBD sensor, a team from the ISC was able to show improved navigation performance at high speeds, as well as increased efficiency in exploring and mapping new areas.
Uncertainty-Aware Occupancy Map Prediction Using Generative Networks for Robot Navigation
Kapil Katyal, Katie Popek, Chris Paxton, Phil Burlina, and Gregory D. Hager
2019 IEEE International Conference on Robotics and Automation (ICRA), doi:10.1109/ICRA.2019.8793500
High-Speed Robot Navigation Using Predicted Occupancy Maps
Kapil D. Katyal, Adam Polevoy, Joseph Moore, Craig Knuth, and Katie M. Popek
2021 IEEE International Conference on Robotics and Automation (ICRA)
ISC researchers integrated the NanoMap framework with their NMPC approach to enable vision-based collision-free navigation with fixed-wing UAVs. As a result, they reached cruise speeds of 20 mph and demonstrated the ability to execute aggressive maneuvers to avoid obstacles. This approach allows for reasoning about sensing uncertainty, both in the state estimates as well as in the depth measurements used for navigation.
Post-Stall Navigation with Fixed-Wing UAVs Using Onboard Vision
Adam Polevoy, Max Basescu, Luca Scheuer, and Joseph Moore
2022 IEEE International Conference on Robotics and Automation (ICRA)
Off-road environments contain a wide range of terrains that pose challenges for conventional autonomous navigation systems. In particular, deformable obstacles, such as grasses, bushes, and other foliage, can be difficult to navigate because these objects, although traversable, appear untraversable when viewed with depth sensors.
To address this challenge, a team from the ISC developed a neural network architecture that uses camera imagery to learn a traversability metric. They collect training data by operating an uncrewed ground vehicle in an environment and evaluating the trajectory deviation error. Objects that are traversable generate a low amount of error, while untraversable objects produce large errors. Given a sampled vehicle trajectory and a history of images, the neural network can learn to predict model error. Using this predictive network, researchers are able to traverse long distances through grasslands, shrubs, and bushes and demonstrate robustness to environments outside the training distribution.
Complex Terrain Navigation via Model Error Prediction
Adam Polevoy, Craig Knuth, Katie M. Popek, and Kapil D. Katyal
2022 IEEE International Conference on Robotics and Automation (ICRA)
Statistical Safety and Robustness Guarantees for Feedback Motion Planning of Unknown Underactuated Stochastic Systems
Craig Knuth, Glen Chou, Jamie Reese, and Joseph Moore
2023 IEEE International Conference on Robotics and Automation (ICRA)