Press Release
Do Robot Swarms Work Like Brains?
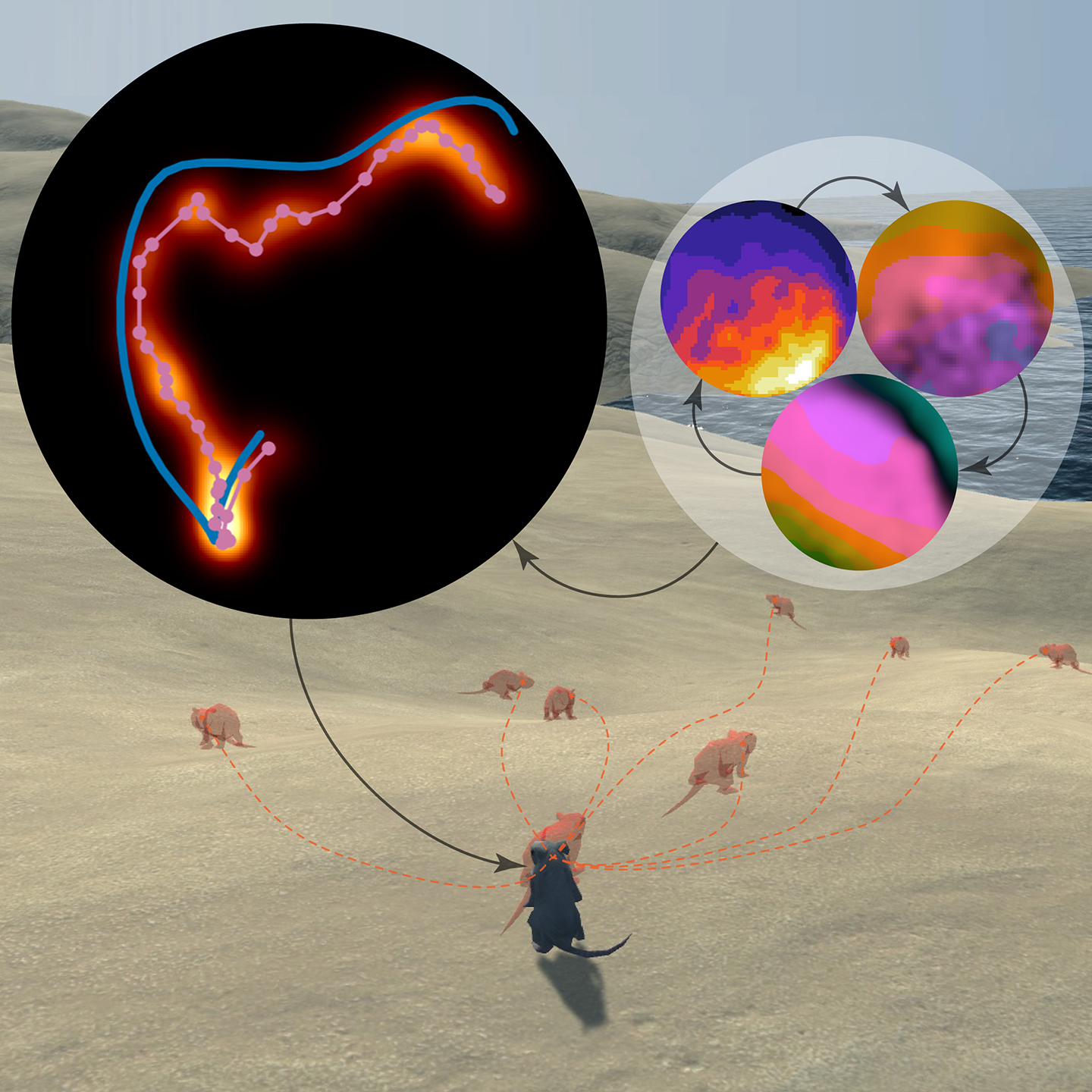
A new study by the Johns Hopkins University School of Medicine and Applied Physics Laboratory will combine research into navigational planning in brains with autonomous robotic swarms to drive advances in both fields. In this illustration, based on research into rat brain activity, measurements of brain activity can be translated into mapping instructions. Within the large circle on the right, the upper left circular image shows a neuron firing rate as the animal moved through space; the image at upper right shows theta rhythms from the hippocampus during the same movement. These are combined to create the bottom image, which shows phase attractors — a key element to creating a map based on those movements. The large circular image on the left shows, in red and orange, the predicted position of the rat in space from the analysis on the right; the blue line shows the rat’s actual path.
Credit: Joseph Monaco/Johns Hopkins School of Medicine
New Johns Hopkins Study Explores Navigation Similarities Between the Mind and Robot Swarms
A new study by the Johns Hopkins University School of Medicine (SOM) and Applied Physics Laboratory (APL) will combine research into navigational planning in brains with autonomous robotic swarms to drive advances in both fields.
“This is a very exciting new project from the perspective of a theorist and computational neuroscientist,” said Kechen Zhang, associate professor at SOM, and the study’s principal investigator. “We propose that individual robots in a group can be thought of as neurons in an animal’s brain. They interact with one another to form dynamic patterns that collectively signal locations in space and time, much in the same way brain rhythms do.”
The study (abstract) will use new information and discoveries about how the brain allows an animal to navigate and change its routes while moving — called dynamic replanning — to improve swarming algorithms to the point that groups of robots will automatically adapt to changes in the environment in the same way that a rat knows which detour to take around an unexpected obstacle. In turn, the neuroscientists will examine the replanning behaviors of drone swarms to evaluate their models of how the rodent brain dynamically replans paths, which will lead to new avenues for neuroscience research.
Zhang will work with a multidisciplinary team of co-principal investigators from APL, including applied mathematician Kevin Schultz, neuroscientist Grace Hwang, robotics researcher Robert Chalmers and STEM program manager Dwight Carr. Joseph Monaco, a postdoctoral biomedical engineering fellow at SOM, is a theoretical modeler on the study. The project was one of 18 funded in September by the National Science Foundation (NSF) to conduct innovative research on neural and cognitive systems.